Aerospace
The aerospace industry utilizes an extensive array of technologies in its constant quest to improve vehicle control, efficiency, range, payload and lifetime. Materials science, communications, aeronautics and engine/propulsion technologies are all critical fields of research and each use electronic signal testing to help determine performance. For example, in material science new products and compounds need to be characterized and qualified to understand how they will perform in different situations. To do this engineers subject the materials to numerous tests to find out their behavior under various conditions such as stress, strain, vibration and temperature. Sensors for key parameters such as strain, force, and acceleration produce electronic signals that all need to be captured and measured. Other technologies such as ultrasound, laser and radio waves may also be used to assist in observing the behavior of the material as it undergoes destructive or non-destructive testing.
To cover the broad range and diverse nature of the electronic signals found in the aerospace industry Spectrum has an extremely wide range of digitizers and arbitrary waveform generators. The products are available in a variety of popular standards including PCI, PCIe, PXI and LXI. They offer bandwidths from 50 kHz to 1.5 GHz, sampling rates from 100 KS/s to 5 GS/s, and resolution from 8 up to 16 bits. When large dynamic range and maximum sensitivity is required high-resolution 14 and 16 bit digitizers are available for the capture and analysis of signals that go as high as 250 MHz in frequency. These high-resolution products deliver outstanding signal-to-noise ratio's (up to 72 dB) and spurious free dynamic range (of up to 90 dB) so that small signal variations can be detected and analyzed. They are ideal for use with the sensors found in mechanical testing systems or with the transducers used in ultrasonic systems.
The higher frequency products are well matched for applications that employ RF and radar signals such as those found in aircraft tracking and guidance systems, surveillance, radio and satellite communications and even electronic warfare. With large on-board memories (up to 4 Gsamples/card) and advanced streaming and readout modes the digitizers are ideal for capturing the long and complex signals found in these fields. In fact, by streaming acquired data over the fast PCIe bus of the digitizer to a RAID based storage array, it's possible to seamlessly store hours of information.
Typical aerospace applications include aeronautical engineering, satellite communications, guidance and tracking systems, destructive and non-destructive materials testing, propulsion and engine testing, surveillance and electronic warfare, impact studies, mechanical testing and vibration analysis.
Spectrum Product Features
- 14 and 16 Bit Resolution
- Sampling rates up to 10 GS/s and Bandwidth over 1.5 GHz
- Segmented Memory with FIFO Readout
- Streaming data to RAID disc array at up to 3 GByte/s continuously
- PCIe, PCI, PXI amd LXI (Ethernet) form factors
Matching Card Families
33xx
Family
A/D family
Sample rate
6.40 GS/s - 10 GS/s
Resolution
12 Bit
22xx
Family
A/D family
Sample rate
1.25 GS/s - 5 GS/s
Resolution
8 Bit
44xx
Family
A/D family
Sample rate
130 MS/s - 400 MS/s
Resolution
14 Bit 16 Bit
66xx
Family
D/A family
Sample rate
625 MS/s - 1.25 GS/s
Resolution
16 Bit
Related Documents
RF Measurements Using a Modular Digitizer
Modern modular digitizers, like the Spectrum M4i series PCIe digitizers, offer greater bandwidth and higher resolution at any given bandwidth than ever before. Although they are in the class of general purpose measuring instruments they are capable of many RF and lower microwave frequency measurements. This article focuses on some examples of common RF measurements that can be performed with these modular digitizers.

Case Study: Real-time high speed logger for embedded systems
CPU based embedded systems now play an increasing part in the monitoring and control of the mechanical and electrical components in many areas of our technological environment.
Mechanical Measurements Using Digitizers
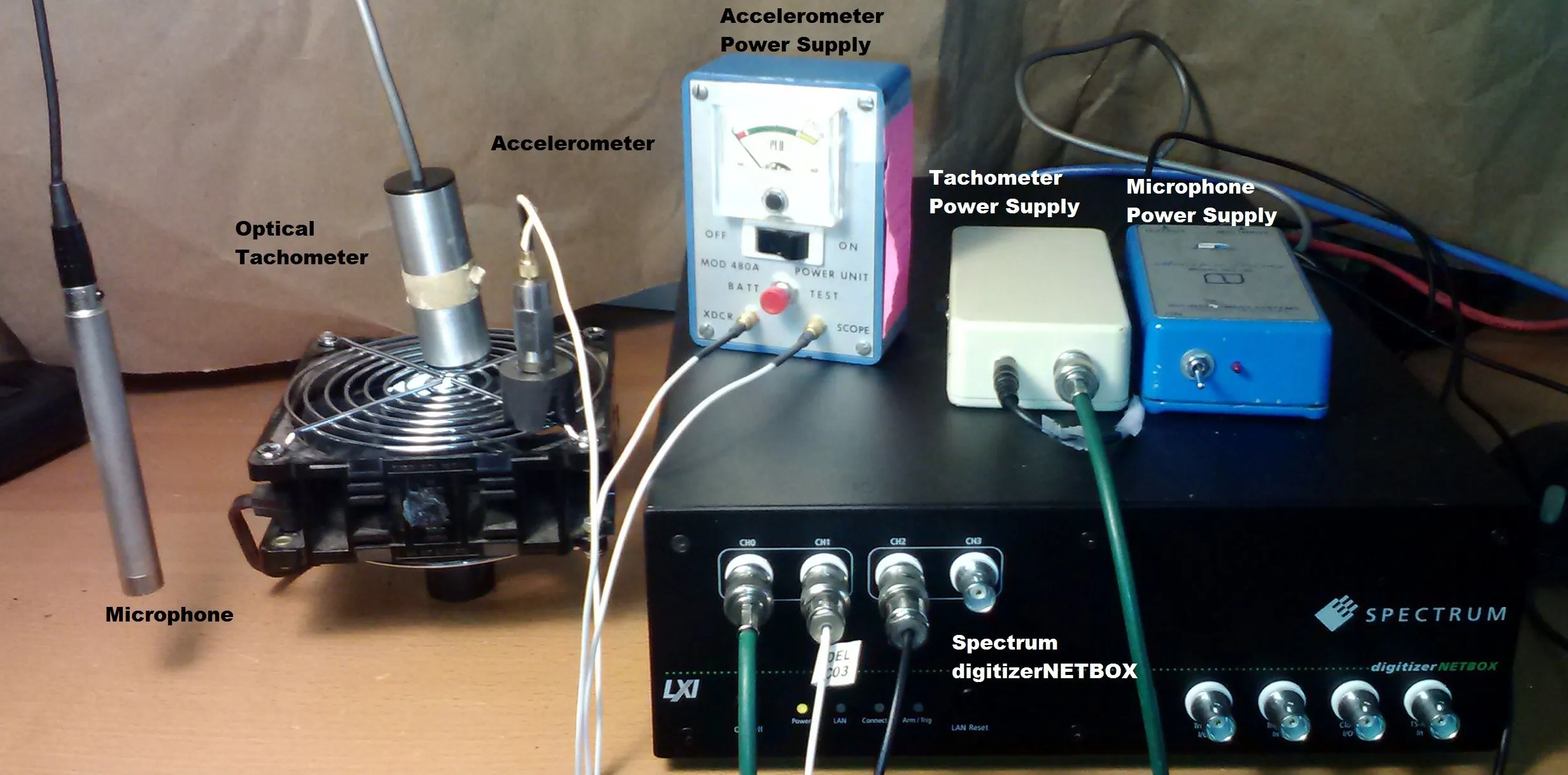
Measurements on mechanical devices and systems using a modular digitizer requires the use of a variety of transducers or sensors in order to convert mechanical parameters such as force, acceleration, pressure, rotational speed, and their kindred into electrical signals you can measure. This article is a primer on making such measurements using a modular digitizer.
Signal Processing for Digitizers
Modular digitizers allow accurate, high resolution data acquisition that can be quickly transferred to a host computer. Signal processing functions, applied in the digitizer or in the host computer, permit the enhancement of the acquired data or the extraction of extremely useful information from a simple measurement.
Testing electronic aircraft systems using modular instruments
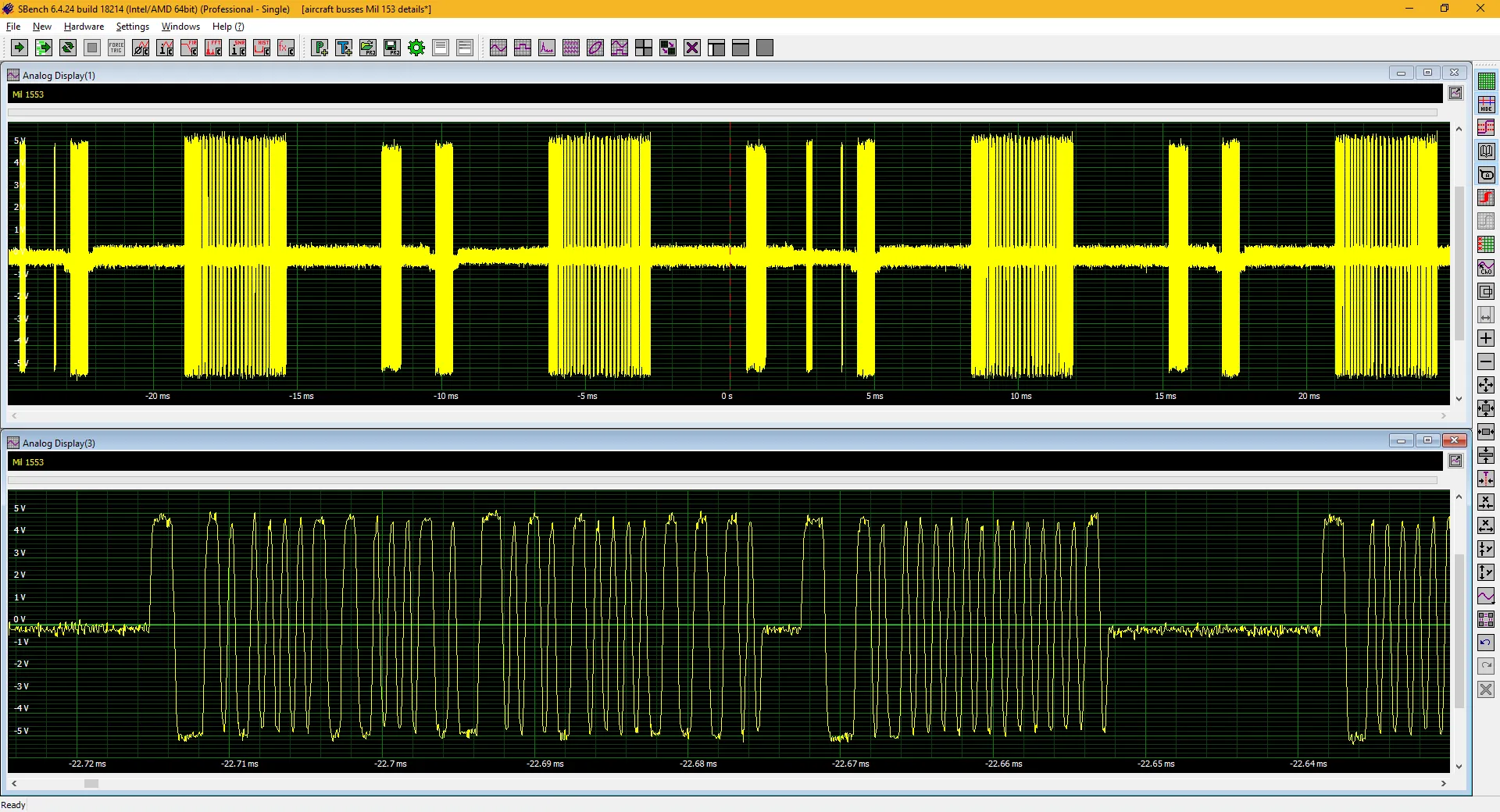
Core electronic aircraft systems include those for power generation and distribution, as well as those for internal data communication, between all devices and systems within the aircraft, and RF devices for external communication. All the other avionic elements depend on these essential buses for either power or data communications. In this article we will see how modular instruments, be they PCIe, PXIe or LXI, offer the necessary multichannel data acquisition and signal generation capabilities required to test and troubleshoot these systems.
Ultrasonic Applications
The use of Ultrasonic products is increasing as new techniques and improvements in instrument performance constantly expand the range of applications. Spectrum digitizers are ideal tools for making ultrasonic measurements and can play a key role required in the development, testing and operation of these products. Spectrum digitizers and arbitrary waveform generators offer a wide range of bandwidths, sampling rates, and dynamic range to match the broad spectrum of ultrasonic measurement needs
Research Papers
Aircraft Engines - Blade Clearances
The University of Lorraine, CNRS, Arts et Métiers ParisTech, in France, is using a digitizerNETBOX DN2.496-16, to study contact interactions in aircraft engines with small blade-casing clearances. To investigate these interactions and the mechanisms of wear deriving from them, they’ve developed a specific ballistic bench in order to perform representative tests of low-pressure compressor environments (up to 270 °C) and enabling only one interaction between an aluminum-based abradable sample and a Ti6Al4V tool. A paper discussing the effects at different temperatures can be found here:
White PaperHypersonic Transition Experiments
Download this white paper to see how a high precision 16 bit Spectrum digitizer M2i.4652 is used at the Institute of Fluid Mechanics, Technical University of Brunswick, Germany for Hypersonic Transition Experiments by clicking here:
White PaperMulti-Heterodyne Interferometry
By using multi-heterodyne interferometry with a high resolution M4i.4471-x8 digitizer the State Key Laboratory of Precision Measurement Technology and Instruments, Tianjin University, Tianjin, China, has developed a method for making absolute distance measurements. Experimental results demonstrate an agreement within 750 nm over 80 m distances and an update rate of 167 μs. To see the full white paper click here:
Research Paper